Angular Displacement, Velocity and Acceleration
Reference > Science > Physics > Study Guide > Unit 6: Rotational and Simple Harmonic MotionIntroduction
Up to this point, we have considered motion of an object in either a straight line or a curved line as though the object had all its mass concentrated at one point. However, most objects in the real world have a physical size larger than zero, and in addition, in the motion of the object through space, we must consider the possibility that the object will rotate around some axis.
In studying rotation, we will proceed much as we did with linear motion. First we will learn how to describe rotation, a kind of rotational kinematics. We will then examine the causes of rotation, a kind of rotational dynamics. Finally we will apply our understanding of rotational motion to a special kind of motion called "Simple Harmonic Motion (SHM).
Angular Displacement
In the following discussion, refer to Figure 6.2.1 below. Consider an object which is free to rotate about some point, C, which we may call the axis of rotation. Let P be a second point located somewhere on the object other than the point C. The line drawn from C to P will be called the radius of the point P. Now draw a line, fixed in space, which we will refer to as the reference line. The angle between the reference line and the radius line will be labeled θ. This angle gives the angular position of the object with reference to the fixed line. It corresponds to the position of an object on the x axis, X, as discussed in the kinematics chapter.
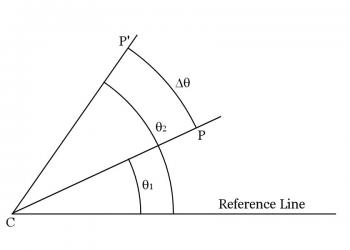
Figure 6.2.1
Now let the object rotate around the point C. At one point in time the object might be located so its angular position is given by θ1. At a later instant, it might be moved so its angular position is given by θ2. The change in angular position is the difference between the two angles, labeled Δθ (delta theta, or "change in theta") in the diagram.
Angular Velocity
We can now define an angular velocity much as we defined linear velocity. The symbol for angular velocity is usually a lower case omega: ω. Thus, we have:Radian measure is preferred because of the ease with which you can go from linear measure to angular measure. Recall that for an arc of a circle, the arc length is equal to the radius of the circle multiplied by the number of radians in the angle which subtends the arc. Thus, the arc length for a complete circle (circumference) is the radius multiplied by the number of radians in a circle, 2p, or C = 2pr. Refer again to Figure 6.2.1. The distance, Δx, the point P has moved as the object rotated can be found by multiplying the angle through which the object has rotated (Δθ) by the radius.
In addition to the angular velocity, we often refer to the frequency of rotation. The frequency of rotation is the number of rotations an object completes in a particular unit of time, usually 1 second. It should be clear that since each complete circle contains 2p radians that the angular velocity and frequency are related as follows:
Angular Acceleration
If an object has its speed of rotation changing, it is possible to define an angular acceleration:Using the same line of reasoning that we used in developing the relationship between angular and linear velocity we have:
Sample Problem
The flywheel of an engine has a diameter of 30cm and completes 3000 rotations each minute. Point P1 is on the rim of the wheel and point P2 is a point on the wheel which is 10cm from the center. Calculate:
- the period of rotation
- the angular velocity
- the linear velocity of points P1 and P2
- the central acceleration of the two points
Sample Solution
1. Since the object rotates 3000 times each minute, it must rotateT =
T = 0.02 s
ω = 2p(50)
ω = 314
v =
v =
v =
v =
a =
a =
Questions
 Unit Index
Unit Index Rotational Equilibrium
Rotational Equilibrium

